

更多文章
更多精彩文章




 QQ空间
QQ空间
 QQ好友
QQ好友
 微信好友
微信好友
 新浪微博
新浪微博
刚体
欧拉第一运动定律
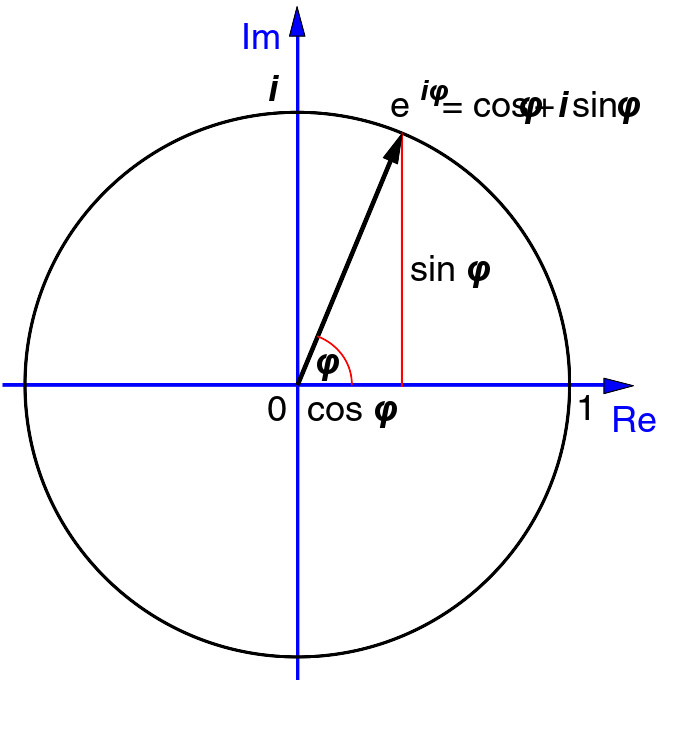
欧拉第一定律表明,从某惯性参考系观测,施加于刚体的合外力,等于刚体质量与质心加速度的乘积。欧拉第一定律以方程表达为
其中,F(ext){\displaystyle \mathbf {F} ^{(ext)}} 是刚体感受到的合外力,m{\displaystyle m} 、acm{\displaystyle \mathbf {a} _{cm}} 分别是刚体的质量、质心加速度。
刚体的平移运动等同于位于其质心、具有其质量的粒子,感受到同样的合外力,而呈现的运动。
导引
思考由 n{\displaystyle n} 个粒子组成的多粒子系统,其质心位置 rcm{\displaystyle \mathbf {r} _{cm}} 为
其中,mi{\displaystyle m_{i}} 、ri{\displaystyle \mathbf {r} _{i}} 分别为第 i{\displaystyle i} 个粒子的质量、位置,m=∑ ∑ -->i=1nmi{\displaystyle m=\sum _{i=1}^{n}m_{i}} 是系统的质量。
质心速度 vcm{\displaystyle \mathbf {v} _{cm}} 为
其中,vi=dridt{\displaystyle \mathbf {v} _{i}={\frac {\mathrm {d} \mathbf {r} _{i}}{\mathrm {d} t}}} 是第 i{\displaystyle i} 个粒子的速度。
质心加速度 acm{\displaystyle \mathbf {a} _{cm}} 为
其中,ai=d2ridt2{\displaystyle \mathbf {a} _{i}={\frac {\mathrm {d^{2}} \mathbf {r} _{i}}{\mathrm {d} t^{2}}}} 是第 i{\displaystyle i} 个粒子的加速度。
第 i{\displaystyle i} 个粒子感受到的力 Fi{\displaystyle \mathbf {F} _{i}} 为
其中,Fi(ext){\displaystyle \mathbf {F} _{i}^{(ext)}} 是这粒子感受到的外力,Fji{\displaystyle \mathbf {F} _{ji}} 是第 j{\displaystyle j} 个粒子施加于第 i{\displaystyle i} 个粒子的内力。
系统感受到的合力 F{\displaystyle \mathbf {F} } 是所有粒子感受到的力的矢量和:
根据牛顿第三定律,内力与其反作用力的关系为
所以,所有粒子彼此施加于对方的内力的矢量和为零,合力等于所有外力的矢量和 (合外力 F(ext){\displaystyle \mathbf {F} ^{(ext)}} ):
根据牛顿第二定律,第 i{\displaystyle i} 个粒子感受到的力 Fi{\displaystyle \mathbf {F} _{i}} 与这粒子的加速度之间的关系为
总和所有粒子所感受到的力,
所以,合外力 F(ext){\displaystyle \mathbf {F} ^{(ext)}} 与质心加速度的关系为
动量守恒定律
多粒子系统的动量 p{\displaystyle \mathbf {p} } 是组成这系统的所有粒子的动量的矢量和:
其中,pi{\displaystyle \mathbf {p} _{i}} 是第 i{\displaystyle i} 个粒子的动量。
欧拉第一定律又可以表达为
假设合外力为零,则系统的动量守恒。
欧拉第二运动定律
欧拉第二定律表明,设定某惯性参考系的固定点O(例如,原点)为参考点,施加于刚体的净外力矩,等于角动量的时间变化率。欧拉第二定律以方程表达为
其中,τ τ -->O(ext){\displaystyle {\boldsymbol {\tau }}_{O}^{(ext)}} 是对于点O合外力矩,LO{\displaystyle \mathbf {L} _{O}} 是对于点O的角动量。
导引
思考由 n{\displaystyle n} 个粒子组成的多粒子系统。对于点O,第 i{\displaystyle i} 个粒子的角动量 Li{\displaystyle \mathbf {L} _{i}} 为
Li{\displaystyle \mathbf {L} _{i}} 对于时间的导数为
根据牛顿第二定律,施加于第 i{\displaystyle i} 个粒子的力 Fi{\displaystyle \mathbf {F} _{i}} 是这粒子的质量与加速度的乘积。所以,Li{\displaystyle \mathbf {L} _{i}} 对于时间的导数为
第 i{\displaystyle i} 个粒子所感受到的合力矩 τ τ -->i{\displaystyle {\boldsymbol {\tau }}_{i}} 为 τ τ -->i=ri× × -->Fi{\displaystyle {\boldsymbol {\tau }}_{i}=\mathbf {r} _{i}\times \mathbf {F} _{i}} 。所以,τ τ -->i{\displaystyle {\boldsymbol {\tau }}_{i}} 与 Li{\displaystyle \mathbf {L} _{i}} 的关系为
总和所有粒子所感受到的合力矩,系统所感受到的合力矩 τ τ -->O{\displaystyle {\boldsymbol {\tau }}_{O}} 与其角动量 LO{\displaystyle \mathbf {L} _{O}} 的关系为
第 i{\displaystyle i} 个粒子所感受到的合力 Fi{\displaystyle \mathbf {F} _{i}} 为
第 i{\displaystyle i} 个粒子所感受到的合力矩 τ τ -->i{\displaystyle {\boldsymbol {\tau }}_{i}} 为
物体感受到的合力矩 τ τ -->O{\displaystyle {\boldsymbol {\tau }}_{O}} 为:
应用牛顿第三定律,
其中,rij=ri− − -->rj{\displaystyle \mathbf {r} _{ij}=\mathbf {r} _{i}-\mathbf {r} _{j}} 是从粒子 rj{\displaystyle \mathbf {r} _{j}} 到粒子 ri{\displaystyle \mathbf {r} _{i}} 的位移矢量。
假设这系统的粒子遵守强版牛顿第三定律,即粒子运动为经典运动,速度超小于光速,则rij{\displaystyle \mathbf {r} _{ij}} 与 Fji{\displaystyle \mathbf {F} _{ji}} 同向,叉积为零。那么,物体感受到的合力矩是所有外力矩的矢量和 τ τ -->O(ext){\displaystyle {\boldsymbol {\tau }}_{O}^{(ext)}} :
这样,可以得到欧拉第二定律方程
假设施加于系统的合外力矩为零,则系统的角动量的时间变化率为零,系统的角动量守恒。
相对于质心的欧拉第二运动定律
所有粒子所感受到的合力矩的矢量和为
其中,ri′=ri− − -->rcm{\displaystyle \mathbf {r} "_{i}=\mathbf {r} _{i}-\mathbf {r} _{cm}} 、ai′=ai− − -->acm{\displaystyle \mathbf {a} "_{i}=\mathbf {a} _{i}-\mathbf {a} _{cm}} 分别是第 i{\displaystyle i} 个粒子相对于质心的相对位移与相对加速度。
注意到所有粒子的相对位移与相对加速度,其矢量和分别为零,所以,
现在,假设将质心设定为参考点,则 rcm=0{\displaystyle \mathbf {r} _{cm}=0} ,方程变为
以质心为参考点,角动量 Lcm{\displaystyle \mathbf {L} _{cm}} 为
所以,不论质心参考系是否为惯性参考系(即不论质心是否呈加速度运动),以质心为参考点,合外力矩等于角动量的时间变化率:
可变形体
在可变形体内部任意位置的内力密度不一定一样,也就是说,其内部存在有应力分布。这内部的内力的变化是由牛顿第二定律主控。通常,牛顿第二定律是应用于计算质点或粒子的动力运动,但在连续介质力学里,被加以延伸后,可以应用于计算具有连续分布质量的物体的运动行为。假设将物体模型化为由一群离散粒子组构而成,每一个粒子的运动都遵守牛顿第二定律,则可以推导出欧拉运动定律。不论如何,欧拉运动定律也可以直接视为专门描述大块物体运动的公理,与物体结构无关。
在塑性力学(plasticity theory)里,施加于一个连续物体B的力可以分类为两种:“长程力”与“短程力”。长程力作用于整个物体的每一部分,称为彻体力(body force),而短程力只能作用于物体表面,称为接触力(contact force)。这样,施加于连续物体的合力 F{\displaystyle \mathbf {F} } 分为净彻体力 Fb{\displaystyle \mathbf {F} _{b}} 、净接触力 Ft{\displaystyle \mathbf {F} _{t}} :
其中,b{\displaystyle \mathbf {b} } 是彻体力场(量纲为力每单位质量),dm{\displaystyle \mathrm {d} m} 是微小质量元素,ρ ρ -->{\displaystyle \rho } 是质量密度,dV{\displaystyle \mathrm {d} V} 是微小体元素,V{\displaystyle \mathbb {V} } 是积分体区域,t{\displaystyle \mathbf {t} } 是表面曳力(surface traction)密度,dS{\displaystyle \mathrm {d} S} 是微小面元素,S{\displaystyle \mathbb {S} } 是积分曲面。
由于彻体力与接触力施加于物体,造成了以某设定点为参考点的对应力矩。这样,对于原点的合力矩 L{\displaystyle \mathbf {L} } 分为净彻体力矩 Lb{\displaystyle \mathbf {L} _{b}} 、净接触力矩 Lt{\displaystyle \mathbf {L} _{t}} :
其中,r{\displaystyle \mathbf {r} } 是微小体元素或微小面元素的位置。
欧拉第一定律(“力平衡定律”)表明,从某惯性参考系观测,施加于连续物体内部任意部分的合外力等于净动量的时间变化率:
也就是说,
其中,v{\displaystyle \mathbf {v} } 是微小体元素的速度。
欧拉第二定律(“角动量平衡定律”)表明,从某惯性参考系观测,施加于连续物体内部任意部分的合力矩等于净角动量的时间变化率:
也就是说,
参阅
欧拉方程 (刚体运动)
欧拉旋转定理
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。



















{{item.time}} {{item.replyListShow ? '收起' : '展开'}}评论 {{curReplyId == item.id ? '取消回复' : '回复'}}